随着无人机技术的飞速发展,其应用场景从简单的航拍娱乐扩展到物流配送、农业植保、应急救援、工业巡检等复杂领域。在这一进程中,实现安全、可靠、智能的自主飞行成为核心诉求,而自主避障能力则是其基石。以同步定位与地图构建(SLAM)技术为核心的导航避障算法,正引领着无人机自主化研究的浪潮。将SLAM导航避障算法的深度教学、技术服务与开发相结合,是推动整个领域迈向更高处的关键路径。
一、SLAM导航避障算法:无人机自主飞行的“智慧之眼”与“决策大脑”
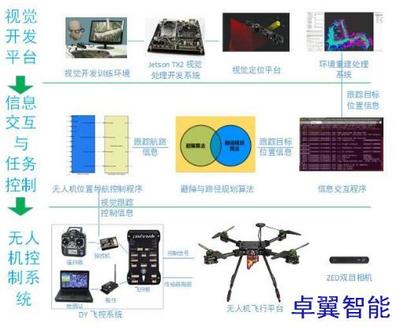
SLAM技术使得无人机能够在未知环境中,实时构建周围环境的地图,同时确定自身在地图中的位置。结合激光雷达(LiDAR)、视觉传感器(单目、双目、RGB-D)、超声波等多元感知数据,SLAM算法为无人机提供了高精度、高鲁棒性的环境感知能力。基于此构建的3D点云地图或语义地图,是后续路径规划与动态避障的决策依据。
在教学研究中,深入理解SLAM的前端(数据关联与位姿估计)、后端(优化与闭环检测)以及建图模块至关重要。经典算法如ORB-SLAM、LOAM、VINS等,以及新兴的基于深度学习的SLAM方法,构成了丰富的教学与实践内容体系。通过剖析这些算法,学生和研究者能够掌握无人机如何“看懂”世界,并为其“思考”如何安全航行奠定理论基础。
二、面向高阶教学的研究与实践框架构建
要让教学研究“迈向更高处”,必须超越理论讲解,构建一个“理论-仿真-实机”一体化的进阶式教学研究框架。
- 理论深化层:系统讲授SLAM的数学基础(如李群李代数、非线性优化)、概率论基础以及计算机视觉/点云处理相关知识。引入多传感器融合(MSF)技术,探讨如何融合IMU、GPS、视觉和激光数据以提升在复杂场景(如动态环境、弱纹理、强光照变化)下的稳定性。
- 仿真验证层:利用Gazebo、AirSim、CARLA等高性能仿真平台,搭建包含各种障碍物、动态物体和复杂光照条件的虚拟环境。在此环境中,学生可以安全、低成本地部署和测试自己的SLAM与避障算法,进行大量的参数调优和性能评估,加速创新迭代周期。
- 实机开发与部署层:这是连接理论与实际应用的桥梁。教学研究需涵盖嵌入式系统(如PX4、ROS)、硬件在环(HIL)测试以及实际飞行平台的算法部署、优化与调试。重点解决算力约束、实时性要求、传感器标定与数据同步等工程实践难题。
三、全链条技术服务与定制化技术开发的双轮驱动
纯粹的教学研究需要与产业需求和技术前沿紧密结合,而专业的技术服务与开发是实现这一结合的有力引擎。
- 技术服务:
- 算法咨询与培训:为高校实验室、企业研发团队提供针对性的SLAM/避障算法原理培训、代码解读与优化建议。
- 方案设计与评估:根据特定应用场景(如室内仓储巡检、复杂林业勘测),提供传感器选型、系统架构设计及可行性评估服务。
- 仿真环境定制:为客户构建高度逼真、贴合业务需求的专用仿真测试环境,用于算法前期验证。
- 技术开发:
- 核心算法模块开发:开发或优化面向特定硬件的轻量化SLAM前端、后端或闭环检测模块,提升在嵌入式平台上的运行效率。
- 动态避障与路径规划集成:将SLAM构建的地图信息与高级路径规划算法(如A、D、RRT*)、动态窗口法(DWA)或基于强化学习的规划方法相结合,开发出能够实时应对突发障碍物的完整自主导航系统。
- 全栈系统解决方案:针对垂直行业(如电力巡线、智慧农业),提供从感知、定位、建图、规划到控制的软硬件一体化自主飞行解决方案,并完成系统集成、测试与交付。
四、迈向更高处:未来趋势与融合创新
未来的无人机自主避障教学与研究,将更加注重以下几个方向的融合与突破:
- 语义SLAM与场景理解:让无人机不仅能构建几何地图,还能识别场景中的物体类别(如行人、车辆、建筑物),实现更智能、更拟人化的避障与交互决策。
- 仿生智能与集群协作:研究鸟群、昆虫的避障机制,并将其融入算法设计;探索多无人机集群的协同SLAM与分布式避障策略,实现“1+1>2”的系统能力。
- 边缘计算与AI芯片赋能:借助专用AI计算芯片和边缘计算设备,实现更复杂SLAM与视觉识别算法的机载实时运行,减少对远程通信的依赖,提升自主性与安全性。
- 与5G/6G及数字孪生深度融合:利用高速低延迟通信,实现部分算力上云、云端高清地图实时更新与下发,并结合数字孪生技术,在虚拟世界中预演和优化无人机的全任务流程。
结论
让无人机自主避障教学研究“迈向更高处”,是一个系统工程。它要求我们以SLAM导航避障算法为核心,搭建起从深度理论教学到高强度工程实践的研究体系,并以专业的技术服务和敏捷的技术开发作为支撑,紧密对接学术前沿与产业实际。唯有如此,才能培养出具备扎实理论功底和强大工程创新能力的高层次人才,并催生出能真正落地、解决实际问题的先进技术,最终推动无人机自主智能飞行技术不断突破天际,抵达新的高度。